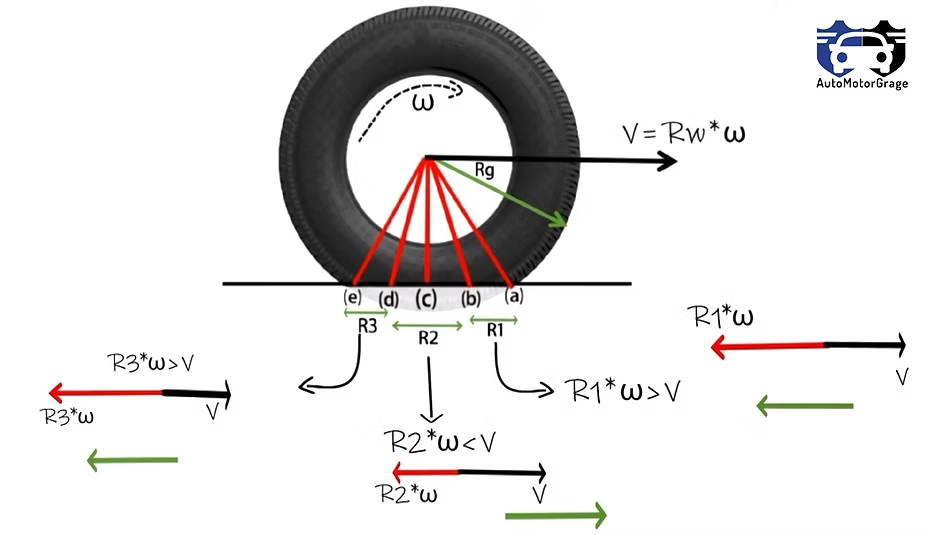
When the tire is loaded ,it forms different radius on the ground while rolling as the tire is compressed from below. Here, in the figure below ,tire is moving forward with velocity V= Rw*ω and rotating with angular velocity ω .
Where,
Rw – Rolling radius
Rg – Geometric radius
At (a) , (b) ,(c) ,(d) & (e) radius are,Rg,Rw,Rh,Rw, & Rg respectively.
Rh -loaded height.
Range of radius from (a) to (b) is R1
Range of radius from (b) to (d) is R2
Range of radius from (d) to (e) is R3
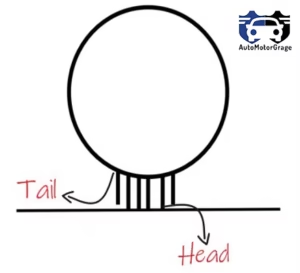
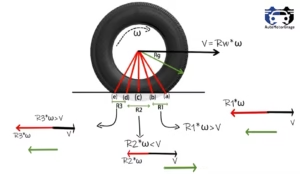
For understanding , i am considering the tire treads as the brush bristles. The point of tread attached to tire is called tail and the point of tread on ground is head. When tire rotates ,the tail moves with the forward velocity of tire and head moves with tangential velocity of tire.
Now in above figure , in section (a) to (b) we can see that R1*ω > V. As head moves with tangential velocity and tail with forward velocity V , So the head will have the tendency to shift towards left direction relative to the tail of tread.
In section (b) to (d) , R2* ω < V , so tail will have the tendency to shift towards right as compare to the head of the tread.
In section (d) to (e) , R3*ω > V , so head will have tendency to shift towards left as compare to head of the tread.
Hence , due to difference on tangential and forward velocity ,tire treads are continuously getting pushed forward and backward , which develops tension in the treads.
Now, let see the the case again at micro level,
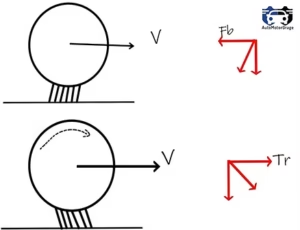
The first figure here is for braking. When you apply the brakes , wheels are locked and are skidding with forward velocity V, basically the forward velocity is greater then the tangential velocity. So , tail will be ahead of head relatively. This will develop tension in the treads and on resolving this tension we will get the backward braking force Fb.
Now the second figure is for accelerating car. On acceleration the tangential velocity increase and then the velocity of car increases. Because of this the tail will be behind the head relatively. This will develop the tension in the treads and on resolving we will get the support force on wheels which is Traction, Tr.
From here we come to following conclusion,
– When their is difference between the peripheral velocity and velocity of vehicle a force is generated.
– Depending on the higher or lower value of forward velocity w.r.t tangential velocity the direction of force changes.
– This relative motion between the tire and road is called slip.
– Without slip their is no force generation.
Slip is given by,
Slip = -(Vx – ω*Rw)/Vx
Where,
Vx -wheel forward velocity
Rw- rolling or effective radius
ω – angular velocity
When ,
Vx > ω*Rw ( Slip is negative) (Tire is skidding )
Vx < ω*Rw (Slip is positive) (Tire is spinning)